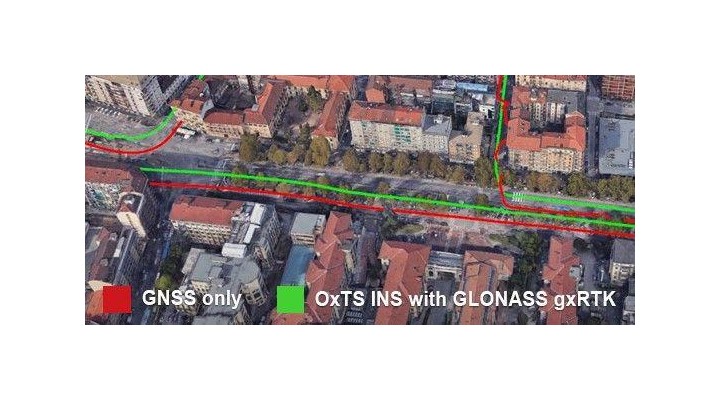
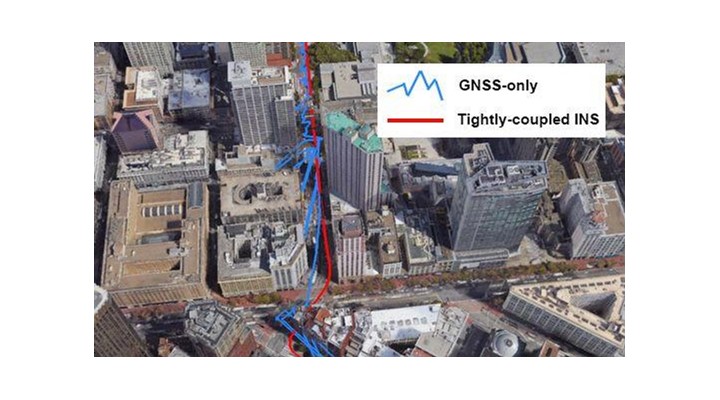
Challenging environments such as urban canyons, bridges, and tree cover can be a nightmare for GNSS-based systems due to multipath, reduced satellite visibility, and complete outages. The combination of GNSS and IMU provides a significant advantage in mobile mapping applications compared to standalone GNSS receivers. Thanks to a number of background technologies, OxTS’ survey customers are currently enjoying enhanced GNSS accuracy for longer periods of time, and in more challenging environments than ever before.
What is gx/ix™?
OxTS gx/ix technology is a powerful GNSS/inertial tight-coupling technology developed to take full advantage of OxTS’ extensive knowledge and experience in GNSS and inertial integration, Kalman filtering, and navigation processing. It is a combination of two independent technologies, gx and ix, which are each designed to improve performance in different scenarios. With gx/ix, the system can intelligently switch between the different modes depending on the environment to ensure the best possible performance in any situation.
If the environment is such that satellite visibility is good, then gx processing is used. The raw GNSS measurements are used to compute position and velocity solutions, rather than using the solutions output by the GNSS receiver. This allows gx processing to create solutions tailored for our Kalman filter that can be integrated more confidently with the inertial solution and improve performance, especially on lower grade GNSS receivers.
In harsher GNSS environments where fewer than 4 satellites are in view or some satellites give bad measurements due to multipath or other effects, ix processing is used. The ix processing algorithms also use the raw GNSS measurements like gx processing, but it integrates the measurements into the navigation engine one satellite at a time in a process known as single satellite aiding. Because ix processing looks at each satellite individually, it doesn’t require the normal minimum of 4 visible satellites to be able to use the measurements. This can greatly help the degradation of accuracy in poor GNSS environments since as long as at least one satellite is in view, it can still be used to aid the inertial measurements and navigation engine.
How does gx/ix processing work?
The gx processing takes the pseudo-range (distance to each satellite) and the Doppler estimate (relative speed of each satellite) and uses these to compute velocity and position, much like a GNSS receiver would do itself. The velocity and position measurements are used by the Kalman filter to keep the outputs accurate. GNSS receivers apply filtering to the velocity and position before they are output. This filter may be used to remove jumps based on some assumptions about the possible motion of the vehicle. It may involve "carrier phase smoothing" of the pseudo-range, which tends to increase the correlation of the position and velocity measurements. By computing our own position and velocity we can avoid some of the filters, which otherwise have to be accurately modelled in the Kalman filter. Like the receiver though, gx processing requires at least 4 satellites in view to be able to compute a solution.
Although ix processing uses the raw GNSS measurements, it does not use them to compute a position and velocity solution like gx processing or a receiver does. Instead it uses the information from each individual satellite it can see to adjust and maintain the last computed position. This means position accuracy can be maintained even when less than 4 satellites are in view.
With pseudo-range or carrier phase differential corrections, the inertial solution is often more accurate than the GNSS float solution. So ix processing can also lock out ambiguities and speed up the convergence time on a correct solution.
gx/ix RTK
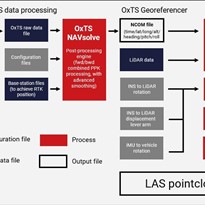
The gx/ix RTK option is an extension of gx/ix that enables the gx and ix processing algorithms to be used in conjunction with carrier phase measurements and RTK correction data for a tightly-coupled centimetre-level accuracy solution. It allows customers to achieve RTK 1 cm position accuracy in post-process along with the additional benefits of gx/ix processing. By taking DGPS corrections from RINEX files, RTCMv3 files or directly from a raw data file, gxRTK removes the need to set up local base-stations or operate radio modems while out in the field. And as well as achieving RTK position accuracy, gxRTK also generates RTK-quality velocity and orientation measurements so all mobile mapping data is as accurate as possible.
gxRTK inertial relock
Inertial relock is a feature that can greatly reduce the time it takes for ambiguity resolution and hence reacquisition time for RTK lock. This means in environments with frequent obstructions, less time (in as little as 5 seconds) is spent outside of RTK mode and the highest level of accuracy is maintained.
When do I need gx/ix RTK?
If you have a dual frequency INS product and are transmitting corrections in real-time, e.g. with a radio link to a base station, then gx/ix RTK is not required to reach RTK accuracy although you won't get the benefit of tight-coupling.
If you are logging base station corrections to add in post-processing then gx/ix RTK is required in order to reach RTK accuracy. Without it, even with carrier phase differential corrections the maximum accuracy achieved will be DGPS mode which gives ~40 cm position accuracy.
Benefit at a glance
- RTK accuracy without having to pay for expensive post-processing software
- Data as accurate as possible in challenging environments
- Maximum flexibility (RTK accuracy without access to a local base station or radio connection, without a modem for subscription based correction services, or when travelling long distances)